בקרה יחסית אינטגרלית |
בקרה האינטגרלית תצליח רק בתהליכים מעטים. כדי לנצל את היתרונות של הבקר I בכל מיני בתהליכים נהוג לצרף אל הבקרה האינטגראלית את הבקרה היחסית.
מתקבלת בקרה יחסית-אינטגראלית (בקר PI).
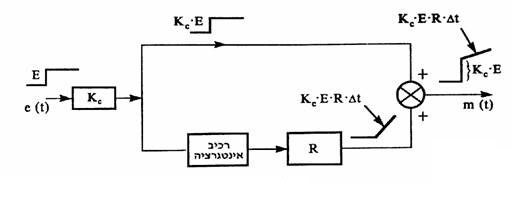
את המשוואה של תפוקת הבקר ניתן לרשום כצירוף שתי המשוואות

כאשר Kc הוא ההגבר של הבקר היחסי-אינטגראלי.
נעקוב אחר תגובת הבקר PI בחוג פתוח, עבור השתנות השגיאה באופן מדרגתי, כמתואר באיור. החלק היחסי שבבקר מאפשר תגובה נמרצת (תגובה דינאמית טובה) לשנויי השגיאה, יותר מאשר בבקר אינטגראלי בלבד. דבר זה יגרום תיקון מהיר יותר. החלק האינטגראלי שבבקר מאפשר תגובה סטטית טובה יותר, כלומר, ביטול השגיאה בזמן קצר יותר.
האיבר M הוא "צף" (כמו בבקרה האינטגראלית) והבקר מכוון אותו באופן אוטומטי על מנת להתאים אותו לדרישות התהליך.
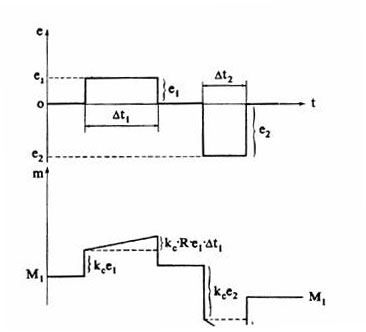
ניתן לתאר את פעולת הבקר PI בדיאגראמת מלבנים , בה, לשגיאה יש אפיין מדרגה (מדרגה בגובה E).
מן התרשים רואים, שאת הטיפול בשגיאה עושות בעת ובעונה אחת הבקרה היחסית והבקרה האינטגרלית.
|
|
|
|
|
|
|
|
© כל הזכויות שמורות למערכת המידע איתן
|
| |





 בקרה אינטגראלית
בקרה אינטגראלית