בקרה נגזרת |
הבקרה הנגזרת משנה הנקראת (derive control or rate control) את תפוקת הבקר לפי הנוסחה הזאת:
מקדם הנגזרת Td נמדד בשניות ונקרא derivetive time. בקרה נגזרת מגיבה רק לקצב השינוי של השגיאה, ולא לגודלה. כאשר השגיאה קבועה, לא מתקיימת פעולת התיקון בבקר 0=e(t)/dt.
מסיבה זו משתמשים בבקרה נגזרת רק בשילוב עם הבקרת היחסית (PD) או עם הבקרה היחסית והבקרה האינטגרלית (PID).
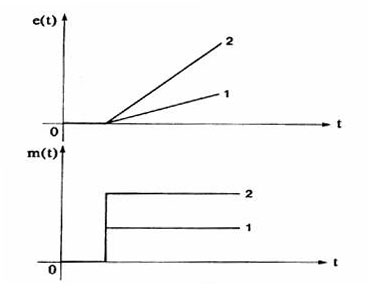
יתרונה של בקרה נגזרת הוא, ששינוי מהיר של השגיאה יגרום לאות מוצא גדול, ואילו שינוי איטי של השגיאה יגרום לאות מוצא קטן. הדבר גורם לשיפור התגובה הדינמית של המערכת. אפשר לומר, שהבקרה הנגזרת מבטלת חלק מן הפיגור בתהליך.
באיור מתוארות תגובות בקר D עבור השתנות השגיאה בקצב שונה.
המשוואה של בקרה (PD )היא

המשוואה של בקר (PID ) היא

|
|
|
|
|
|
|
|
© כל הזכויות שמורות למערכת המידע איתן
|
| |





 בקר PI
בקר PI