בקרה דו-מצבית |
בשיטת הבקרה הזאת, יציאת הבקר נמצאת באחד משני מצבים, שהם בדרך כלל קיצוניים. על פי רוב, המגע החשמלי הוא המבטא את תפוקת הבקי.
כמובן, גם אלמנט הבקרה הסופי יימצא בשני מצבים קבועים בלבד. לדוגמה, שסתום סגור לגמרי או פתוח לגמרי; גוף חימום מתחבר למקור הזנה במגע של התרמוסטט, או מתנתק על ידיו.
נעקוב אחר מצבי הפעולה של אלמנט בקרה סופי (שסתום, למשל), עבור השתנות המשתנה המבוקר, כפי שהיא מופיעה כאן:
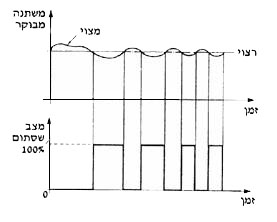
כשהערך המצוי נמצא מצדו האחד של הרצוי, האלמנט הסופי נמצא באחד ממצביו האפשריים, וכשהשגיאה משנה את קוטביותה, האלמנט עובר למצבו האחר. תפוקת הבקר היא בעלת שני ערכים בלבד, ואלה מאלצים את אלמנט הבקרה הסופי, לנוע בין שני המצבים הקיצוניים. תיאור זה מוביל למסקנות, לגבי אופי הפעולה של הבקר. תפוקת הבקר המתקבלת אינה תלויה בגודל השגיאה, אלא רק בקיומה ובכיוונה.
שיטת בקרה זו, אינה מאפשרת לבקר במדויק את התהליך, כך שערך המשתנה המבוקר יהיה שווה לערך הרצוי. תנודות של הערך המצוי נוצרות סביב הערך הרצוי (ראה איור). כשהתהליך מתאים לבקרה זו, מתקבלות תנודות זעירות.
תדירות ומשרעת התנודות נקבעות לפי תגובתו הדינמית של התהליך. תגובה איטית (תהליך בעל פיגור זמן גדול) גורמת שתדירות התנודות קטנה והמשרעת גדלת תהליך שבו התגובה מהירה גורם להקטנת המשרעת ולהגדלת התדירות. ,זמן השהיה במערכת, מגדילים את המשרעת ואת התדירות גם יחד. על פי הנאמר למעלה, נגדיר את פונקציית הבקר הדו-מצבי
עבור m(t)=M1 e(t)>0
עבור m(t)=M2 e(t)<0
לרוב 100%=M1 מגדיר מצב פתוח של אלמנט הבקיה הסופי, %0=M2 מגדיר מצב סגור של אלמנת הבקרה הסופי.
תפוקת הבקר הדו-מצבי היא בדרך כלל מיתוג מתח חשמלי (בממסר חשמלי). ניתן לקבל אפקט של בקר דו-מצבי כאשר משתמשים בבקר פנימטי אוניברסלי, המכוון להגבר גדול מאוד.
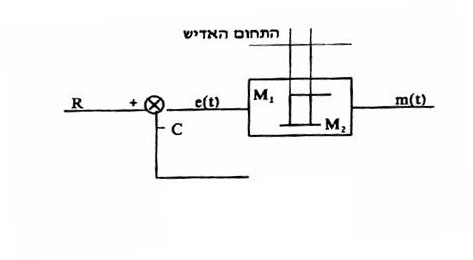
בדיאגרמה מלבנית, בקר דו-מצבי יוצג כך:
חוסר היציבות בבקרה דו-מצבית הוביל לשימוש בבקר דו-מצבי, הפועל בשיטה שונה. בשיטה זו, לבקר יש שני אותות תפוקה, המאלצים את האלמנט הסופי לנוע בין שני מצבים קבועים, המתחלפים ביניהם, כשהערך המצוי יוצא משני צדי תחום כלשהו. לתחום, קוראים תחום אדיש (תחום מת). רוחב התחום יכול להיות קבוע מראש או ניתן לכוונון.
השינוי בשיטת ההפעלה מגדיל את השגיאה הדינאמית, אך לעומת זאת גורם להקטנת תדירות ההפעלה של אלמנט הבקרה הסופי.
בדיאגראמה מלבנית אפשר לראות את משמעותו של התחום האדיש:
לתהליך איטי, אפשר לקבוע שהתחום האדיש יהיה קטן יחסית, ולא ייגרע הרבה מדיוק המערכת.
דוגמה נפוצה של בקר דו-מצבי שיש בו תחום אדיש, היא תרמוסטט לקביעת טמפרטורת המים בדוד חשמלי. גוף בימטלי (דו-מתכתי) קובע את החיבור או את הניתוק של גופי החימום בערכים שונים של טמפרטורת המים. ההפרש של כמה מעלות הוא התחום האדיש.
|
|
|
|
|
|
|
|
© כל הזכויות שמורות למערכת המידע איתן
|
| |





 בקרה נגזרת
בקרה נגזרת