בקרה אינטגראלית |
הפתרון לבעיית הOFFSET הוא שימוש בבקרה אינטגראלית. המשוואה של הבקרה אינטגראלית היא כדלהלן:


כאשר -
R - מהירות האינטגרציה
Ti - זמן האינטגרציה
M1 - קבוע האינטגרציה
בדיאגראמת מלבנים נראית המשוואה כך :
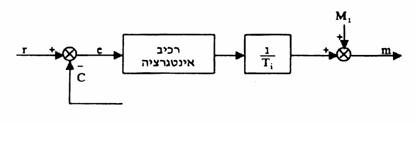
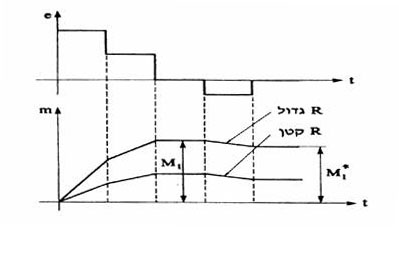
ניתן לתאר או לבדוק את פעולת הבקר, בבדיקת הבקר בחוג פתוח (בלי תהליך ובלי משוב). בבדיקת זו מכניסים שינוי מלאכותי של השגיאה e לתוך הבקר ורושמים את ההשתנות מm. באיור הבא מוצגת תוצאה של בדיקה כזו, לשינוי הדרגתי של e.
בבקר אינטגראלי, שינוי מדרגה בe- טרם שינוי שיפוע ב-m. מידת השיפוע תלויה במהירות האינטגרציה R. כאשר השגיאה 6 חוזרת לאפס, ה-m נשאר קבוע אך אינו חוזר לערך הקודם, כלומר: הערך של M1 "צף" ותלוי בהיסטוריה הקודמת של הבקר. לכן, בקרה אינטגראלית נקראת לפעמים באנגלית (floating control) (בקרה צפה). שם נוסף של הבקרה האינטגראלית היא (reset control)
אם השגיאה בעלת אפיין מדרגתי, אפשר לרשום את נוסחת הבקר כך:
M = R * e * dt + M1
כאשר dt הוא השינוי בזמן , שבו השגיאה נשארת קבועה.
כל עוד קיימת שגיאה כלשהי, הבקר ממשיך לשגות את הפונקציה m. תפוקת הבקר תישאר קבועה אך ורק כאשר 0 =e. לכן, בקר I מבטל את הOFFSET לחלוטין, כאשר הוא עובד בחוג סטר. יש לציין שנדרש זמן לביטול השגיאה.
לסיכום, אפשר לקבוע כי הבקר האינטגראלי לגודל והשגיאה ולזמן קיומה. חסרונו של הבקר האינטגרלי, שהוא מאט את תגובת המערכת, והדבר יכול לגרום תנודות במשתנה המבוקר.
|
|
|
|
|
|
|
|
© כל הזכויות שמורות למערכת המידע איתן
|
| |





 בקרה יחסית
בקרה יחסית