חדשות בתחום הרובוטיקה:
ניתוח טלרובוטי ראשון בוצע באמצעות רשת תקשורת
רובוט בעל שלוש זרועות המחקות במדויק יד של רופא מנתח, כולל פרק כף היד ותנועת אצבעות, אפשרו למנתח לבצע ניתוח
לפרסקופיה בחולה שאושפז במרחק של 400 ק"מ

רשת IP מתקדמת של סיסקו שימשה כתשתית לניתוח טלרובוטי ראשון בהיסטוריה שבוצע בקנדה. רובוט בעל שלוש זרועות המחקות במדויק יד של רופא מנתח, כולל פרק כף היד ותנועת אצבעות, אפשרו למנתח לבצע ניתוח לפרסקופיה בחולה שאושפז במרחק של 400 ק"מ. הניתוח ההיסטורי התאפשר לאחר השלמתה של רשת תקשורת מבוססת IP בעלת אמינות גבוהה שנפרסה בין שני בתי חולים במדינת אונטריו, קנדה.
ב- 28.2.03 ניתח ד"ר מהרן אנווארי, מומחה ידוע שם בתחום הניתוחים הזעירים, בבית החולים סנט ג'וזף בעיר האמילטון – חולה שהיה מאושפז מאות קילומטרים משם בבית חולים בעיר נורת' ביי. ד"ר אנווארי הפעיל רובוט מתוכנן במיוחד שפעל באמצעות שדירת ה-IP של חברת בל קנדה שקישרה בין בתי החולים. ד"ר אנווארי הסתייע ברופא-מנתח מקומי בביצוע הניתוח שהתאפשר הודות לרשת ה- VPNE virtual private network enterprise)) מתוצרת סיסקו.
הכתבה המלאה ב http://www.hayadan.org.il/BuildaGate4/general2/data_card.php?U=no
רובוט עם פנים אנושיות ינסה להתחבב על האדם
טכנולוגיה / "קיי-בוט" מסוגל להציג 28 הבעות בעזרת 24 מנועים; עד כה התקשו מדענים להתחרות ברובוטים האנושיים שמציגה הוליווד

שתיים מהבעות פניו של "קיי-בוט". חסר זהות מינית. מקור: דיוויד הנסון
בעיני רבים, תקשורת עם מחשבים לא נחשבת לתענוג גדול: יושבים מול הצג, מקלידים על המקלדת ודוחפים את העכבר אחורה וקדימה. חברות רבות מנסות לשנות את הממשק הבסיסי שבין האדם למחשב - ובראשן חברות וגופי מחקר שעוסקים בפיתוח רובוטים. אלה מבינים, כי ההתקדמות בתחום הרובוטיקה תבוא לא רק משיפור יכולת התבונה המלאכותית של הרובוטים, אלא גם מהממשק האנושי שייבנה בשבילם. הרובוט "קיי-בוט" (K-bot) אמור להוות את פריצת הדרך בהקשר הזה.
קיי-בוט, רובוט ייחודי המדמה פנים אנושיות, הוא פרי המצאתו של דיוויד הנסון, עובד לשעבר בתאגיד "דיסני", שעושה בימים אלו את עבודת הדוקטורט שלו באוניברסיטת טקסס שבעיר דאלאס; הוא מקווה שקיי-בוט ישולב בעתיד ברובוטים תעשייתיים. "הפנים האנושיות הן הממשק הטבעי ביותר של אדם-מכונה", אמר הנסון בראיון ל-BBC בשבוע שעבר. "בעתיד זו תהיה הדרך שבה נתקשר עם מחשבים".
הכתבה המלאה ב http://www.hayadan.org.il/BuildaGate4/general2/data_card.php?U=no
טיסת בכורה לזבוב-רובוטי
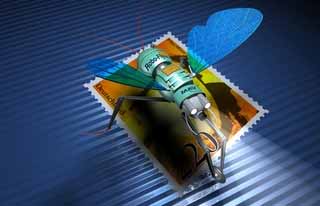
צוות באוניברסיטת קליפורניה בברקלי, ערך ניסוי טיסה ראשון ל"מזל"ט אולטרה-זעיר", בעל כנף מתנפנפת כמו של זבוב.
ה"זבוב-הרובוטי" (רובו-פליי) היה בעל מוטת-כנפיים של 3 ס"מ ומשקלו 300 מיליגרם בלבד - כמו עלה כותרת של פרח הורד.
בקנה-מידה זעיר שכזה, עקרונות האוירודינמיקה ש"מחזיקים באויר" מטוס, לא תקפים. לכן, המודל על-פיו נבנה ה"רובו-פליי" היה זבוב-פירות, שמעופו באויר נעשה באמצעות כנפיים מתנפנפות, במהירות עצומה (מאות פעמים בשניה!) - מה שמאפשר לו להתקדם, וגם לסוב על צירו במקום.
הכתבה המלאה ב
http://www.hayadan.org.il/BuildaGate4/general2/data_card.php?U=no
רובוטים יסייעו בחיפוש אחר מים במערכת השמש
מהנדסים פיתחו רובוט-בולדוזר שאמור לפעול בכוכבי לכת שכנים

תצלום: נאס"א הרובוטים של נאס"א. שילוב בין בולדוזר למשאית עפר
מהנדסים מנאס"א הציגו אבטיפוס של רובוט קטן, שיוכל בעתיד לסייע בחקירת פני השטח של כוכבי הלכת השכנים. הרובוט נראה כמו שילוב בין בולדוזר למשאית עפר. משקלו אינו עולה על 4.6 קילוגרמים, הוא אמור לפעול ללא נהג ולהצליח להתגבר על מכשולים הנקרים בדרכו. הוא מונע באנרגיה סולארית.
הרובוט מצויד בזרוע עם כף קטנה, שמשמשת אותו לערום עפר ולרוקנו למיכל. הזרוע גם מסייעת לו לייצב את עצמו מחדש, אם הוא מתהפך.
מפתחי הרובוט אומרים כי הפיתוח נמצא כעת בשלבים ראשוניים. אבל, לדבריהם, לאחר שפיתוחו יושלם, ניתן יהיה לשלוח כמה רובוטים לכוכבי הלכת השכנים, כדי לחפור בפני השטח שלהם, ולגלות נתונים חדשים על הרכבם.
כתבה מלאה ב
http://www.hayadan.org.il/BuildaGate4/general2/data_card.php?U=no
|
|
|
|
|
|
|
|
© כל הזכויות שמורות למערכת המידע איתן
|
| |








 גבול המדע
גבול המדע