ניהוג דיפרנציאלי Diffrantial Drive |
הניהוג הפשוט ביותר מבחינת תכנות, בניה והפעלה. הניהוג הדיפרנציאלי מבוסס על שני גלגלים הנמצאים על ציר דמיוני משותף, כלומר כל גלגל מונע באופן בלתי תלוי בשני (בדרך כלל מיושם ע"י דיפרנציאל ומכאן שמו של הניהוג). באמצעות סידור זה, הרובוט מסוגל לנסוע ישר, להסתובב במקום או לנסוע במסלול קשתי.
בעיית תכנון חשובה עבור רובוט מבוסס ניהוג דיפרנציאלי הינה כיצד להבטיח את יציבותו. חוץ משני גלגלי הניהוג, נדרשת תמיכה נוספת כדי שהרובוט לא יאבד את שיווי משקלו. לרוב, בעיה זו נפתרת ע"י גלגל עזר אחד או שניים (גלגל "משוגע"- ראה הרחבה על בחירת גלגל "משוגע" בהמשך) אשר יוצר מערך גלגלים בצורת משולש (במקרה של אחד) או מעוין (במקרה של שניים). כמובן, שבתוספת גלגל יחיד, הרובוט עדיין פגיע לבעיית שווי המשקל בהתאם למיקום מרכז המסה שלו והתאוצות שמופעלות עליו.במבט תחתון. ניהוג דיפרנציאלי יראה כך:
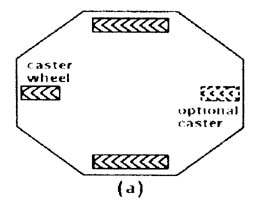
ביתן לראות את זוג גלגלי הניהוג, בתוספת גלגל עזר אחד או שניים (בתרשים caster) אם הרובוט בנוי ללא גילל העזר האופציונלי, ונע קדימה (ימינה) במהירות ולפתע עוצר, הוא יאבד את שיווי משקלו בכוון התנועה אלא אם מרכז המסה שלו ממוקם במידה מספקת בצדו האחורי (שמאל). כדי לפתור בעיה זו, אנו צוות המבנה מיקמנו את מירב ההתקנים בעלי המשקל הגדול בצדו האחורי של הרובוט. דוגמא להתקנים מסוג זה: סוללות ובקר הרובוט.
פתרון אפשרי נוסף לבעיית היציבות הוא מערך גלגלים בצורת מעוין (בתוספת שני גלגלי עזר), אך מערך זה ייצור שתי בעיות חדשות:
הבעיה הראשונה, בעיית עבירות ממישור לשיפוע עולה חד, או במעבר מכשול גדול. הגלגל, שרדיוסו קטן יחסית, יתקע ולא יהיה מסוגל לעבור מכשול - הרובוט עלול להתקע(הבעיה אמנם לא נוגעת אלינו כיוון שהמסלול נטול מכשולים אך יש לקחת אותה כגורם).
הבעיה השניה מתוארת בתרשים הבא:
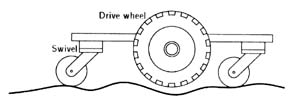
במקרים בהם גלגלי העזר מחוברים באופן קשיח לגוף הרובוט, צורת פני שטח גלית עלולה לגרום לניתוק נקודת המגע של הגלגלים המניעים עם פני השטח. במצב זה, המניעים מאבדים שליטה ויכולת תמרון על הרובוט - הרובוט עלול להתקע. לכן, שימוש בזוג גלגלי עזר במבנה מעוין דורש השעיית פעולתם.במקרה של אבדן מגע של המניעים עם פני השטח. פתרון אפשרי לבעיה כזו הוא גלגל "רך" בעל תושבת קפיצית, היכול להידחף אל גוף הרובוט וכך במצבים אלו למנוע ניתוק מגע בין גלגלי ההנעה לפני השטח.
בעיה נוספת, שיש לקחת בחשבון בעת תכנון מערך ניהוג דיפרנציאלי עבור רובוט אוטונומי, הינה כיצד לבצע נסיעה ישרה של הרובוט. הבעיה נובעת ממגבלות המנועים - גם כאשר אותו מתח מסופק לשני המנועים, הם יסתובבו במהירויות שונות (מפני שלא קיימים שני מנועים זהים לחלוטין) והרובוט יסטה לאחד הצדדים. כדי ליצור תנועה ישרה, יש להבטיח כי הגלגלים יסתובבו במהירויות זהות באמצעות סינכרון בין המנועים כאשר המנועים עובדים עם עומסים שונים, לדוגמא כאשר כל גלגל נע על משטח בעל מקדם חיכוך שונה, מהירויות כל מנוע ישתנו. במצב זה הרובוט יסטה ממסלולו גם אם כויל לתנועה ישרה קודם לכן. מסקנה - מהירות כל מנוע חייבת להיות מבוקרת באופן דינמי - דרוש אמצעי שישנה את מהירות הסיבוב של מנועי הרובוט ברגע שזו סוטה מהנקודה הרצויה. זאת נבצע באמצעות דגימות בתדירות גבוהה ותיקון מתאים של מהירות כל מנוע.
ישנן מספר אפשרויות בקרה קונבנציונליות: בקרה פרופורציונלית 13, פרופורציונלית- אינטגרלית , האחרונה בשילוב עם אלמנט דיפרנציאלי מקבלים, בקרה עמומה או בקרה מבוססת רשתות עצביות. התמודדות ם שיטות הבקרה הינה משימת של צוות התוכנה, לכן לא נרחיב בנושא זה.
ניתן לסכם ולציין שניהוג דיפרנציאלי הינו פשוט וקל לביצוע אך יחד עם זאת, גורם למורכבות מסוימת של מערכת הבקרה. כיום, הקטנת המורכבות המכנית על חשבון מורכבות האלקטרוניקה והתוכנה הינה דרך אפקטיבית (ולרוב גם זולה) להתמודדות עם הבעיות שציינו.
|
|
|
|
|
|
|
|
© כל הזכויות שמורות למערכת המידע איתן
|
| |





 שיטות ניהג
שיטות ניהג