רעיונות לרובוטים עם רגליים
איור זה מראה את הסוג טרטרפוד גבוה ממבט צד. בחיות אלו (כגון כלב או חתול) הרגלים בדרך כלל ממוקמות תחת גוף יחסית ארוך וצר. רוב תנועות הרגלים הם לאורך, והרגל דומה למטוטלת. האיור מראה מבט צד כיוון שתנועה מסוג זה של רגליים, לצדדים היא די מוקבלת. בדרך כלל, תנועה אנכית (הרמת רגל) תתבצע ע"י כיפוף ה"ברך" או אלי פעולה שמרימה ומרידה את נקודת הציר. אלו אינם מודגמים כאן.
הקושי העיקרי שנוצר עם סוג זה של רגל היא הפעולה ה"מתגלגלת" הנוצר ע"י שינוי גובהה בציר עם הרגל עשויה מחומר קשיח. האיור למעלה מראה את הרגל בשלושה מצבים בפסיעה קדימה. בתחילת הפסיעה (1) נקודת הציר נמצאת יותר נמוך מאשר באמצע הפסיעה (2), וכך גם בסוף הפסיעה (3). זה לא בדיוק המקרה באיור כיוון ששם יש חלק קפיץ המפצה על ההפרש בכוחות הפועלים על הרגל בכל שלב של הפסיעה. כלומר, נקודת החיבור בין הרגל נמוך נמצאת בגובה די קבוע כאשר הכוחות הפועלים על הרגל גדלים או קטנים. במקום שינוי בנקודת הציר, האורך של הרגל משתנה במשך הפסיעה. קימים מימושים של רובוטים שמשתמשים ברגלים מסוג זה אפילו בלי התוספת הקפיצית שמתוארת באיור ולכן מימוש כזה אפשרי בהחלט.
סוג הארתרופוד הוא סוג הרגל הנפוץ ביותר בין רובטוים הולכים. סוג זה של רגל יוצא מהגוף לצדדים, מתחבר לברך שאליה מתחבר עוד רכיב של הרגל הפונה כלפי מטה למרות שהרגל יכולה להיות מחוברת בזווית ללא ברך מחברת.
האיור שלמעלה מראה סוג רגל זה בצורה הפשוטה ביותר שלו. הבעיה שאנו נתקלים בה בעיצוב זה היא שבזמן הפסיעה נקודת המגע עם הריצפה מתרחקת ומתקרבת אל הגוף. כיוון שרגלים בצד אחד יש רגלים מקבילות בצד שני, כוחות הצד הנוצרים בזמן הפסיעה גורמים לגוף לנוע מצד לצד וכתוצאה מכך יש עיבוד של כוח גרירה בכמה מן הרגלים.
האיור הבא מדגים זאת בצורה יותר טובה.
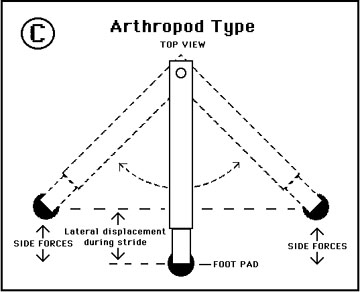
בהנחה שנקודת הציר מחוברת באופן קשיח לגוף, כוחות הצד הנוצרים בצמן התנועה לצדדים של נקודת המגע כאשר הרגל נעה בקשת שלה, גורמים לעיבוד של כוח גרירה בכפות הרגלים.
כדי להפחית תופעה זו יש צורך בלהוסיף חלק לרגל כך שכף הרגל תשאר במקומה כאשר הגוף זז קדימה. האיור הבא מראה איך אפשר לעשות זאת.
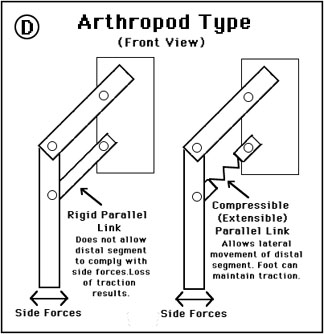
ניתן להשתמש במחבר מקביל לחלק הקרוב של הרגל כדי להחזיק את החלק הרחוק של הרגל באנכית. ניתן להשתמש במחבר קשיח או במחבר קפיצי להשגת המטרה. שימוש במחבר קפיצי יאפשר למחבר להתארך כאשר הרגל נעה אחורה ולהתקווץ שוב כאשר הרגל נעה כלפי נקודת המרכז של הפסיעה. בדומה לרגל מהסוג טרטפוד גבוה, סוג הארתרופוד פועל די טוב גם בלי תוספת זו. למרות זאת, תחת תנאים מסוימים כאשר החיכוך הוא קריטי, כגון תיפוס על שיפוע או סוגים שונים של שטיחים, תוספת זו יכולה לשפר את הביצועים באופן ניכר. המכשול הגדול ביותר בישום הוא למצוא קפיץ אם התכונות המתאימות לרובוט מסוים.
דרך נוספת לשפר את הנתייה של כפות הרגלים לאבד כוח גרירה היא להגביל את התנועה הזויתית של הפסיעה, בכך להקטין את כוחות הצד. שינוי זה דורש להגדיל את קצב הפסיעות אם רוצים לשמור על אותה מהירות כמו קודם. לגישה זו יש כמה חסרונות. דבר ראשון, יש מצבים, כגון סיבוב על המקום, בהם חשוב שתהיה תנועה זויתית של הרגלים ב-90 או יותר מעלות. ניתן לפתור בעיה זו ע"י תוכנה, אבל הרבה מצבים מיוחדים אחרים יכולים להיות מסובכים לפתירה. דבר שני, הגברת קצב הפסיעות מקטין את גובה ההרמה המקסימלי של הרגל בתנאי שלא נכתבה תוכנה הפותרת בעיה זו. שוב, יהיה הרבה יותר פשוט לא להתעסק במוניפולציות מסוג זה אם ניתן לפתור את הבעיה בצורה אחרת. אף על פי כן, מציאת הקפיץ המתאים היא גם בעיה לא פשוטה ולפעמים הפתרון שהוצע למעלה הוא אף פשוט יותר.
© כל הזכויות שמורות למערכת המידע איתן