ניהוג סינכרוני
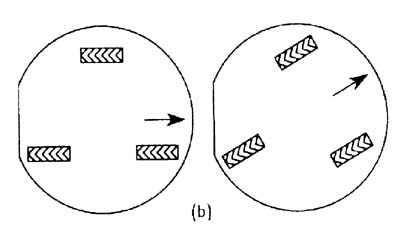 עקרון עבודת הניהוג הסינכרוני מבוסס על כיול המנועים וכיוון כל שלושת הגלגלים יחדיו בו זמנית. הגלגלים מקושרים בצורה כזו כך שכל נקודה על פני הרובוט נעה באותו כיוון בכל עת. תנועת הגוף הקשיח מבוצעת בצורת העתקה קווית ולא סביב ציר סיבוב נקודתי. כדי לשנות כיוון, מסובב הרובוט את כל גלגליו בו זמנית יחסית לציר אנכי (כפי שנראה בתרשים). באופן זה, כיוון תנועת הרובוט משתנה אך שלדת הרובוט ממשיכה להצביע על אותו הכיוון. במבנה של רובוטים מסוימים, קיימת חשיבות לחלוקה לאזור קדמי ואחורי, לכן יש להעזר במחברים מכאנים שתפקידם לשמור על מבנה הרובוט כך שיצביע לכיוון הרצוי.
עקרון עבודת הניהוג הסינכרוני מבוסס על כיול המנועים וכיוון כל שלושת הגלגלים יחדיו בו זמנית. הגלגלים מקושרים בצורה כזו כך שכל נקודה על פני הרובוט נעה באותו כיוון בכל עת. תנועת הגוף הקשיח מבוצעת בצורת העתקה קווית ולא סביב ציר סיבוב נקודתי. כדי לשנות כיוון, מסובב הרובוט את כל גלגליו בו זמנית יחסית לציר אנכי (כפי שנראה בתרשים). באופן זה, כיוון תנועת הרובוט משתנה אך שלדת הרובוט ממשיכה להצביע על אותו הכיוון. במבנה של רובוטים מסוימים, קיימת חשיבות לחלוקה לאזור קדמי ואחורי, לכן יש להעזר במחברים מכאנים שתפקידם לשמור על מבנה הרובוט כך שיצביע לכיוון הרצוי.
© כל הזכויות שמורות למערכת המידע איתן